杠杆原理与永动机
戴榕菁
2021年对我来说是打破能量守恒的一年。先是受到宇宙膨胀造成的光能损失的启发,我发现了其实在宇宙中每时每刻都因红移和蓝移而随机地损失能量及随机地产生能量。后来DDWFTTW现象让我确定即便是在宏观的被认为属于经典力学的范围内的机械运动也同样可以违背热力学第一定律(即能量守恒定律)和热力学第二定律。在对于DDWFTTW现象以及网上所介绍的历史上人们曾经设想过的各种永动机模型所进行动力分析的过程中,我提出了无平衡态(de-equilibrium)的概念,说的是当一个系统不存在静止平衡态的时候,它便成为一个永动机。
无平衡态的概念不仅是对于永动机的动力学特点的描述,而且是对于产生永动的动力学条件的表达或者说是对于成为永动机条件的一种严格定义。
但是,即便得知了产生永动机的无平衡态条件之后,我仍然对于到底是什么原理使得永动机可以在没有外力做功的前提下产生能量这个问题感到困扰。于是,在过去这段时间里我开始反复思考是什么样的原理决定了宏观机械运动的能量可以不守恒。隐约中我感觉到了是那个古老的杠杆原理,那个几千年里指导着人类用小力来产生大力的杠杆原理在这背后起着制造能量的作用。几天前我决定用一个简单的模型来验证一下这个想法。我采用的模型很简单,就是在一根杠杆的两端各系一个重物,让杠杆的支点偏离中心,杠杆的初始位置水平,初始速度为零。然后算它在运动中的总能量。因为这是一个非线性的问题,所以我很自然地想到了进行级数展开求近似解。我一开始只取了非线性展开的第一项,结果得出了总能量增加的结论。当时感到又兴奋又震惊。但是,第二天我重新进行推导时,没有进行级数展开而是用精确解进行分析,结果发现能量是守恒的。也就是说,我在前一天是白兴奋白震惊了一把。
于是我又仔细考查了一番杠杆原理与永动机之间的关系,明确了这样一点:杠杆原理本身并不会打破能量守恒,但杠杆原理确实可以决定永动机的产生,那是因为杠杆原理可以帮助实现我前面提到的无平衡态。无平衡态的存在才是永动机成为可能的最直接的原因,而杠杆原理则是间接的原因。
我们知道在一个引力场(如地球的引力范围内)中的一个物体在引力的作用下将趋于最小势能态,这个结论在经典力学和广义相对论中都是一样的。比如初始角度不为零的单摆在重力的作用下将会向最底势能点运动,也就是向摆锤的竖直最底点运动。当到达该最底势能点时,摆锤获得由势能转化来的最大动能。但由于摩擦力的作用,摆锤的势能的一部分会消耗为分子的热运动,一段时间后,摆锤就趋于静止。
但是,如果一个系统的最小势能态是一个非平衡态,那么即便有摩擦力所造成的能量耗损,它也永远无法达到静止态,因而将一直运动下去直到系统的条件(参数)改变,这就是所谓的永动机。下面我们来看一个简单的无平衡态的例子。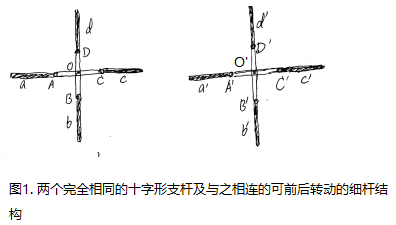
图1中是两个完全一样(画得不好,请大家发挥想象力)的十字形状支架子及与之相连的细杆结构。每个架子的支杆都可绕其中心(O或O’)转动。每个支杆的端点(A,B,C,D或A’,B’,C’,D’)都链接着一根与支架的杆子同等长度的细杆。每个细杆都可绕与支杆之间的链接进行前后转动,但不能在与所连接的杆子垂直的方向移动。这两个支架系统的选材要满足这样的条件:支架的材料要质量轻但强度大,不易变形,而与支架相连的细杆则要求质量大,也不易变形。这样就可以保证在转动过程中系统的惯性由细杆决定,而支架只是起到连接细杆以及实现转动的作用。
然后,我们将两个支架系统相邻直立着,并两个支架的垂直平面之间有个60°的夹角,并且将细杆a与a’,b与b’,c与c’,d与d’相互链接。那么当支架的A,B,C,D以及A’,B’,C’,D’处于图1中的正面位置时,除了c与c’之外,其中的a,b,d以及a’,b’,d’就不会处于图1中的位置。图2是当支架的A,B,C,D以及A’,B’,C’,D’处于图1中的正面位置时的俯视图。其中的虚线代表b,d和b’,d’细杆的位置。
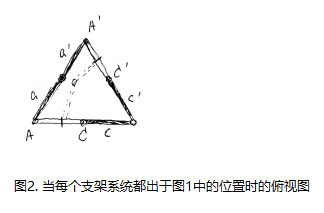
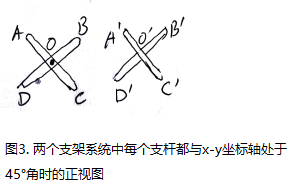
图3是当两个支架中的支杆都转到与(想象中的)x-y轴成45°角时的正视图。
而图4为当两个支架处于图3中的位置时的俯视的示意图。

我们假定这两个支架系统都是用3D打印按照同一套参数制作出来的,因此两套系统之间的误差在完全可以忽略的范围之内。在这个前提下,我们可以得到一个非常有用的特性:这两个系统之间只存在着细杆通过链接而产生的拉力和推力,不存在竖直方向的剪切力。有了这个特性,我们在分析每个支架系统的转动过程中的角动量与角动能时就可以忽略另一个支架系统的作用。这是由对称性得出的直接结论,它对于分析这整个系统的动力学特性非常重要!
很明显,由图1至图4所显示的系统一定是一个永动机系统,而且是一个任何拥有3D打印机的人都可制作出来的永动机系统。这是因为这个系统不存在一个静止的平衡态。因此,无论当每个支架处于什么角度,我们都可根据杠杆原理得知,其中一个支架会做顺时针转动而另一个做逆时针转动(这里的顺时针及逆时针指的都是从系统外面看各个支架的正面时的运动)。
所以,这里我们就看到一个由杠杆原理决定了的无平衡态系统的永动机!
讨论
并非所有的永动机现象都是由杠杆原理决定。最初促使我来研究永动机现象的DDWFTTW运动就不是由杠杆原理决定的。当然,任何一辆车子都少不了齿轮,而齿轮运用的就是杠杆原理,所以并不是说DDWFTTW运动就完全与杠杆原理无关,而是说杠杆原理在DDWFTTW运动中的作用并非象在本文上面所介绍的永动机中的作用那样直接。
另外,虽然本文所介绍的永动机与DDWFTTW车子都属于无平衡态永动机,但是两者的基本动力特性有所不同。本文所介绍的永动机是完全无条件的永动机,而DDWFTTW运动需要有初始的外加动量以使得系统进入到动态无平衡态之后才成为永动机运动。我们可以将前一种无平衡态称为完全无平衡态,而后一种称为动态无平衡态。相应地,我们可以将完全无平衡态的永动机称为完全无平衡态永动机,而将DDWFTTW车子这样的永动机称为动态无平衡态永动机。