海归学者发起的公益学术平台
分享信息,整合资源
磁控软体机器人是一种具有较好人机交互能力的新型机器人,在医疗领域的应用有着巨大的潜力。但是因为软材料的柔软性,导致此类机器人无法进行有效储能,因而存在输出力较小、能量密度低的问题,无法满足诸多医疗手术需求。
近日,同济大学唐一超课题组与德国马克思普朗克研究所合作研发了一种基于相变机制的无线软体机器人。在磁场的驱动下,这种机器人可以对外部环境进行高能量密度输出,实现 70N的输出力和175.2 J/g的比功,在不牺牲柔软特性的基础上将磁控软体机器人的比功提升了6到7个量级。此外,此软体驱动器可以通过可编程磁化,获取跳跃、蠕动等运动模式,为相关的医疗机器人介入人体环境提供了可能性。在此基础上,本文通过动脉假体环境下流体冲击实验验证了其优秀的锚固和阻塞能力,并结合双稳态超材料套管,设计可进行折叠-展开的双稳态支架,有望在更多医疗领域进行相关应用。这项研究成果近期以“Wireless Miniature Magnetic Phase-Change Soft Actuators”为标题,发表于 Advanced Materials。本文利用“磁场吹气球”的机制提升磁控软体机器人能量输出,即通过射频磁场远程加热软体腔内的液体,使其沸腾从而产生压强,实现高能量输出。具体来说,作者将液体包裹在含有四氧化三铁纳米颗粒的柔软材料外壳中,四氧化三铁在射频磁场作用下发热,使内腔液体沸腾成气态。此外,该软外壳由含钕铁硼颗粒的硅胶构成,在低频磁场下可进行可控移动。以上用到的射频磁场和低频磁场控制手段均具有无接触性,因此可以对驱动器进行远程无线控制。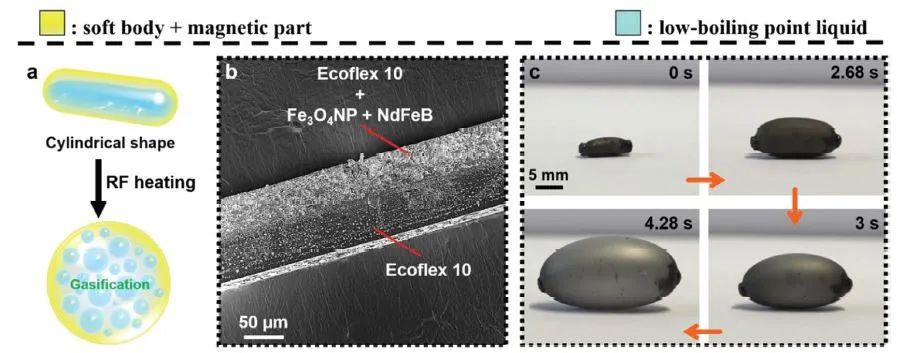
对该类机器人而言,变形过程中逐渐积累的应变能阻碍了能量输出,因此本文采用最简单的单腔结构设计,并通过结构优化,降低机器人在变形过程中的阻力,最大程度地把能量输入转换为能量输出。单腔设计使得毫米尺度机器人可以对环境产生70N输出力,最高比功达到175J/g,性能远超主流磁控软体机器人。得益于此,该机器人有潜力应用于血管阻塞。通过低频和射频磁场的交替驱动,机器人可以运动至指定位置,在射频磁场激励下撑住血管并承受0.24米/秒的脉动流体冲击(动脉血流速度为0.049-0.19米/秒)。
视频3:磁控相变机器人的血管阻塞测试,可以承受0.24米/秒的脉动流体冲击
基于磁控相变软体驱动的血管支架
支架是医生解决心多类血管疾病的主要手段之一,目前的支架置入技术已经比较成熟,但这种技术需要借助导管输送,且支架一旦释放将永久停留在体内,无法进行重定位或回收。本项研究将相变驱动器与双稳态形状记忆套筒结构相结合,开发出一种在磁场控制下可以进行可逆展开-闭合的支架结构,该结构利用相变材料和形状记忆高分子对射频磁场的感应灵敏度的差异,实现在单一驱动信号下(射频磁场)支架可逆的折叠和展开。总的来说,该项研究利用简单的相变机制,大幅提升了磁控机器人的比功和输出力,实现了微型医疗机器人的性能跃进,距离运用磁控微型机器人技术解决现实世界的临床问题更近了一步。同济大学唐一超教授和德国马普所李明通博士为该研究工作的共同第一作者;胡文琪教授和Metin Sitti教授为共同通讯作者。论文第一单位为同济大学。https://onlinelibrary.wiley.com/doi/10.1002/adma.202204185
本文系网易新闻·网易号“各有态度”特色内容
媒体转载联系授权请看下方
