“ 壁虎能在墙上行走,竟然有这么多的玄机~!
记得小学老师说过,壁虎能飞檐走壁而不掉下来,是因为脚上有许多小吸盘。。。

然而,对于这些吸盘的“信任”也就停留在了当年的一知半解状态。。。小伙伴们四处逮壁虎,最终也没有搞明白这些吸盘到底是个什么样!
来自斯坦福大学的Mark Cutkosky博士领导的团队,一直对壁虎爬墙情有独钟地研究,并发表了一系列研究论文,详细地阐述了壁虎身上的“黑科技”!根据他们的研究成果,这个团队还研发出了一种新型的材料,来模仿壁虎的爪子。并用这种特殊材料,造出了一个可以在任意表面攀爬的壁虎机器人Stickybot。
可以说,这是一次彻底的仿生学成功案例。Stickybot壁虎机器人至少运用了两项从壁虎身上学习而来的研究成果。其实,壁虎的脚上并没有我们想象中那种“小吸盘”,起到吸附作用的是壁虎脚掌上分布的成千上万的超细绒毛。这些超细小的绒毛结构,利用了一种叫“范德华力”的原子间吸引力。使得壁虎脚部能够被吸附在任何表面之上,无论是玻璃、水泥、钢铁、木头还是树叶。。。。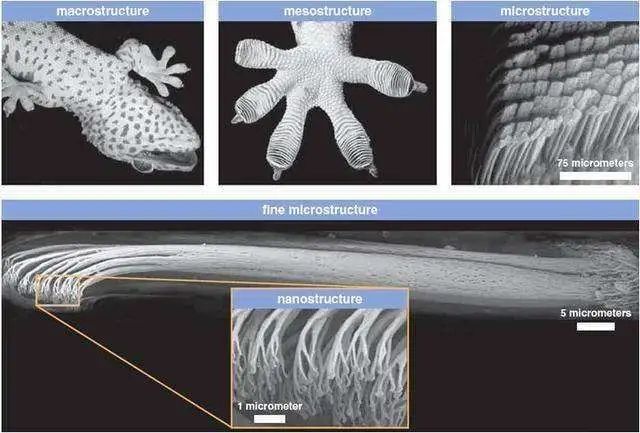
这个范德华力,其实在我们的生活中无处不在。。。
简单介绍一下。。。。一般的原子是这样的,电子分布在原子核的周围,原子整体呈现中性。此时空间中两个临近的原子之间并没有任何吸引力。
假设左侧是墙面的原子
右侧是壁虎脚部的原子
但,这种电子均匀分布的状态并不是持续不变的,有些时候原子一侧的电子会比另一侧略多一些,这就导致这个原子整体呈现一侧阳性、一侧阴性。
那么,右侧壁虎脚部的原子,就会将左侧玻璃原子中的电子吸引过去,从而导致玻璃原子内的电子分布也变得不均匀,偏向于右侧。但,这需要一个前提,那就是壁虎脚部的原子要和玻璃的原子离得足够近!
左侧玻璃原子的电子
被右侧壁虎足部原子的阳性所吸引
也开始偏向分布于右侧
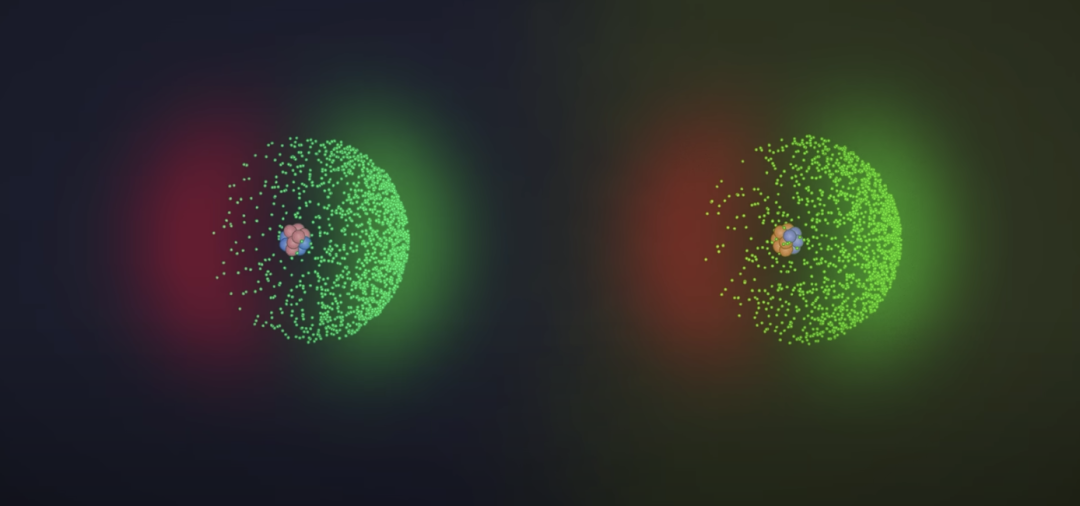
于是,两个原子就像N极对S极的两个磁铁一样,互相吸引了起来。并且将一直维持这样的吸引状态,直到有更大的外力强行拆除它们。也就是说,只要壁虎脚部紧挨着玻璃足够近,就会有大量的脚部原子和玻璃上的原子产生范德华力,这样无数互相吸引的原子对的吸引力组合到一起形成了合力,导致了在宏观层面上一种很强大的吸引力。
但是,问题来了。。。为什么壁虎可以,而人类的手就不行,就不能产生这样的范德华力呢??
无法导致足够多的手指原子与键盘原子靠得足够近,以至于无法产生足够多的范德华合力!
而,壁虎脚部表面的绒毛的最小尺度单位,已经来到了100纳米级别,绒毛数量则多至百万级以上,这就导致每一个绒毛头部都可以贴合墙壁表面。
数量众多,最终产生的吸附力合力,远远大于几倍于壁虎自身的重力。但是,另一个问题又来了,为什么需要的时候可以吸附上,而不需要时,又可以快速拔除呢?比胶带要轻松很多?这就涉及到Mark Cutkosky博士团队的第二个研究成果了——绒毛倾角Mark Cutkosky博士团队发现壁虎脚上的绒毛都统一朝一个方向倾斜,这就导致了需要粘合的时候,和需要拔除的时候,发力的方向不同。拔除时剪切力导致绒毛一排一排地被拔开了。也就是说,需要吸附时,脚掌绒毛受到牵引,所有绒毛都会越来越贴合墙体表面,范德华力的合力越来越大!
而反之,需要拔除时,从另外一个角度去牵引,就会导致绒毛一层一层地脱离表面,范德华力的合力就会越来越少,直至脱落。
如果你注意观察,就会发现,壁虎在行走时,脚掌并不是直接贴在墙表面的,而是由脚掌中心区域至最外侧依次贴合上去。
这说明壁虎把聚集范德华力的主动权完全放在了自己手掌里,而不是仅仅交给重力去做。当脚掌由中心依次向外贴合墙面时,增加吸力。反之则拆解吸力。
据此原理,Mark Cutkosky博士团队研发出的纳米材料,可以轻松地实现物体的吸附与解除吸附。


这就是很好地利用了“倾角”设计
让重力自然牵引纳米材料吸附西红柿
而反过来就是“释放”
根据这个原理团队造出了,仿生壁虎的机器爪子。。。。
三个蓝色的方块是范德华力纳米材料。中心部位的驱动器,通过三个黄色的“肌腱”牵引蓝色纳米材料,最终吸附和释放玻璃。再配合规律的四肢运动,于是这个能在任何表面上攀爬的壁虎机器人Stickybot2,就诞生了!
而Mark Cutkosky博士团队最新的研究成果,已经支持,人类戴一副手套,就能攀爬墙体了。。。
没错,不久的将来,一副黑科技手套就可以让你飞檐走壁!!!
不过阿汤哥早在《碟中谍4》中就告诫过我们,无论什么黑科技,一定是要记得提前充满电哦~!